Enseñarán a robots cómo caminar con software
Prefieren aprendizaje empírico a modelaje manual
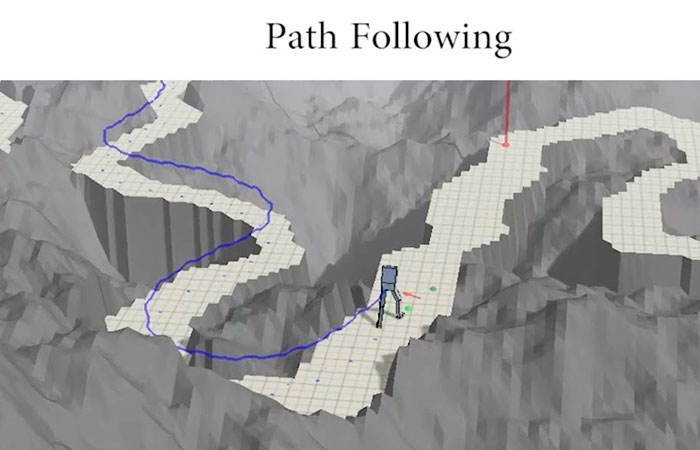
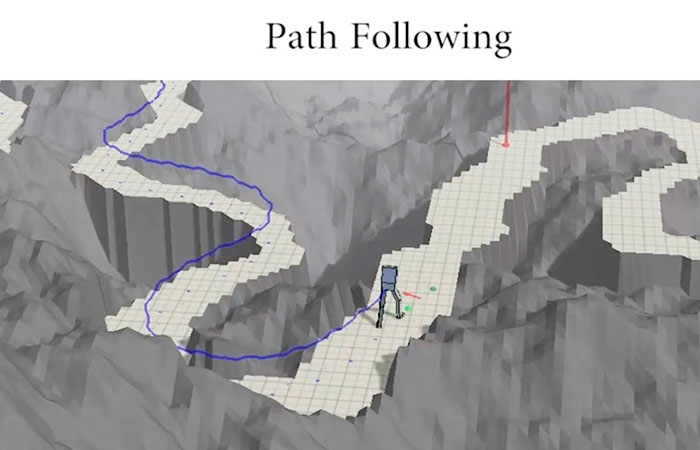
Michael van de Panne, profesor de Ciencias de la Computación en la Universidad de Colombia, presentó durante el evento SIGGRAPH 2017 su proyecto DeepLoco, con el cual proponeenseñarle a robots cómo caminar con software. Con esta innovación, el experto en algoritmos de aprendizaje pretende que el proceso de la "caminata mecánica" se vuelva mucho más integral y orgánico.
De acuerdo a su presentación, su software permite poner a personajes animados (o representaciones digitales de robots físicos) en entornos donde repita una y otra vez la tarea de caminar por un sendero determinado. De esta forma, a través de prueba y error, las máquinas podrán aprender cómo moverse correctamente, sin la necesidad de programar estos comportamientos manualmente.
Automatización de Procesos





 ACV aparece antes de la vejez mientras obesidad eleva discapacidad
ACV aparece antes de la vejez mientras obesidad eleva discapacidad Quintana Roo amplía financiamiento solar ante crecimiento récord de demanda eléctrica
Quintana Roo amplía financiamiento solar ante crecimiento récord de demanda eléctrica Serfimex destinará mil millones a financiar energía solar en Quintana Roo
Serfimex destinará mil millones a financiar energía solar en Quintana Roo Marco abandona el factoring, va por una plataforma para operar entre México y EEUU
Marco abandona el factoring, va por una plataforma para operar entre México y EEUU